시리우스2 라이브러리에서 손쉽게 경로에 따른 출력 신호를 제어하는 손쉬운 방법을 제공합니다. 일명 Ramp 혹은 RTC 제어기에서는 자동 레이저 제어 (ALC: Automatic Laser Control) 라고도 합니다.
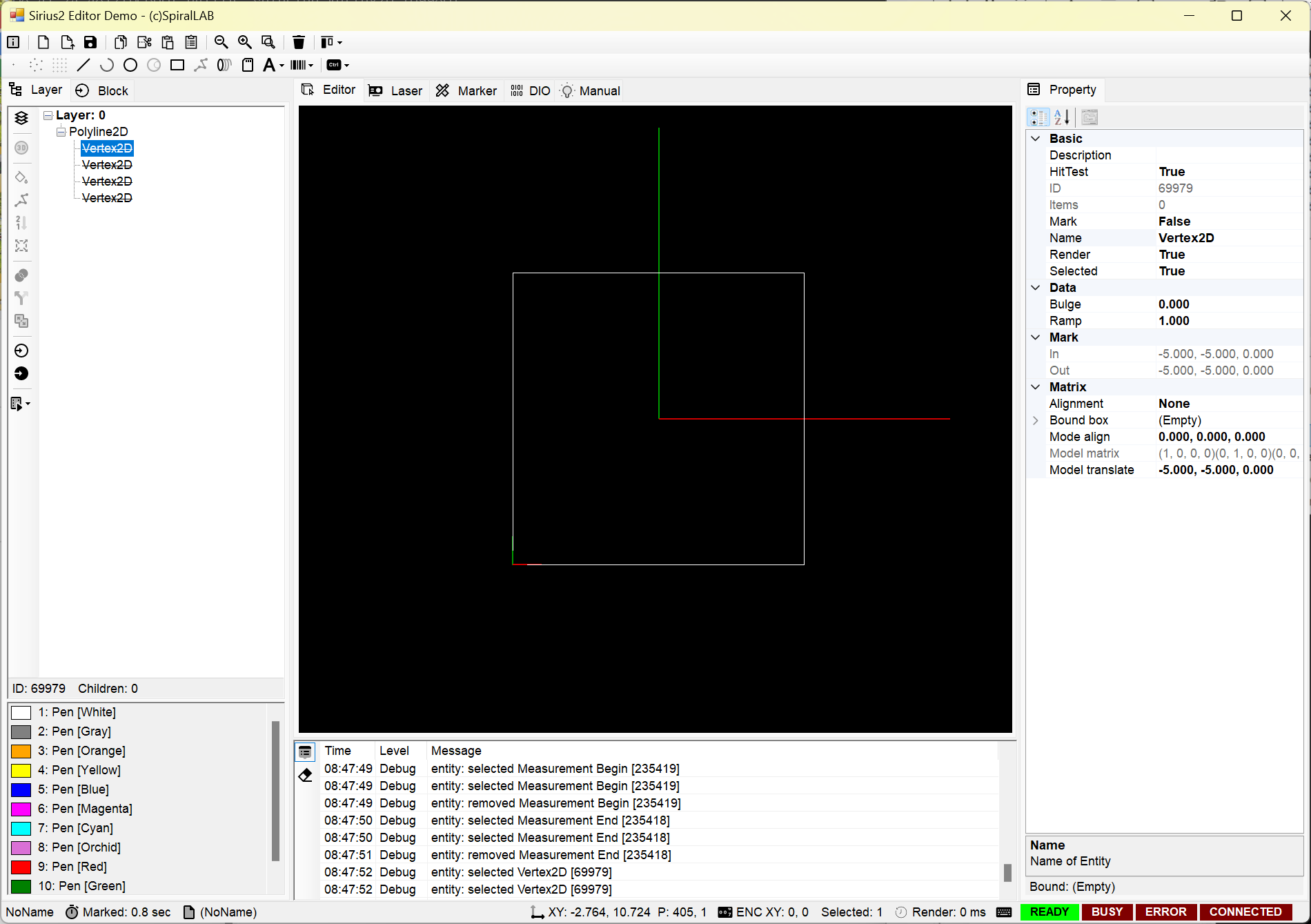
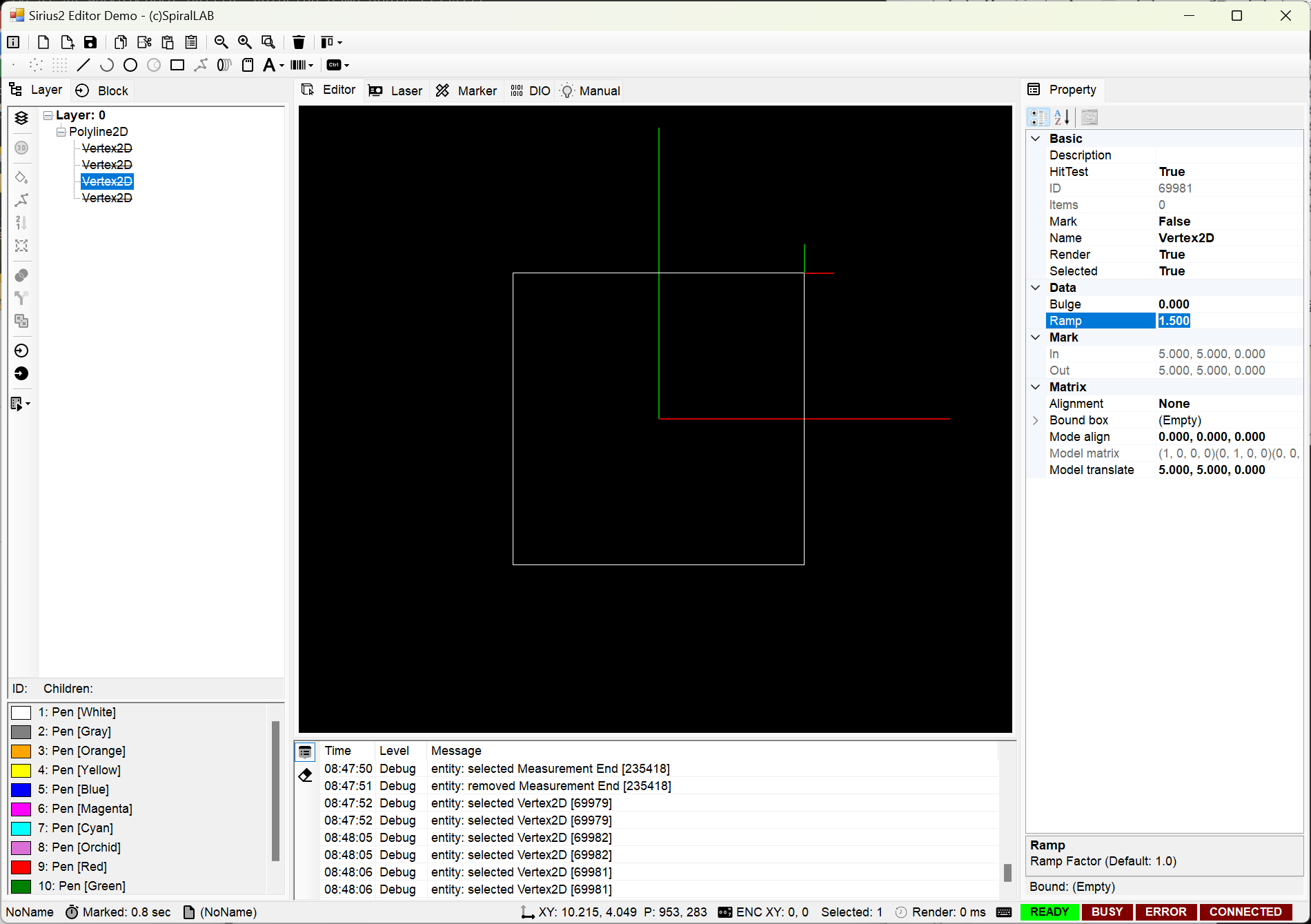
위와 같이 폴리라인(Polyline) 개체를 사용한 예를 들어보겠습니다. 폴리라인은 개별 정점(Vertex) 에 Ramp Scale Factor 을 지정할 수 있습니다. 위 폴리라인에 4개의 정점에 Ramp Scale Factor값을 각각 1, 0.5, 1.5, 1 지정하였습니다.
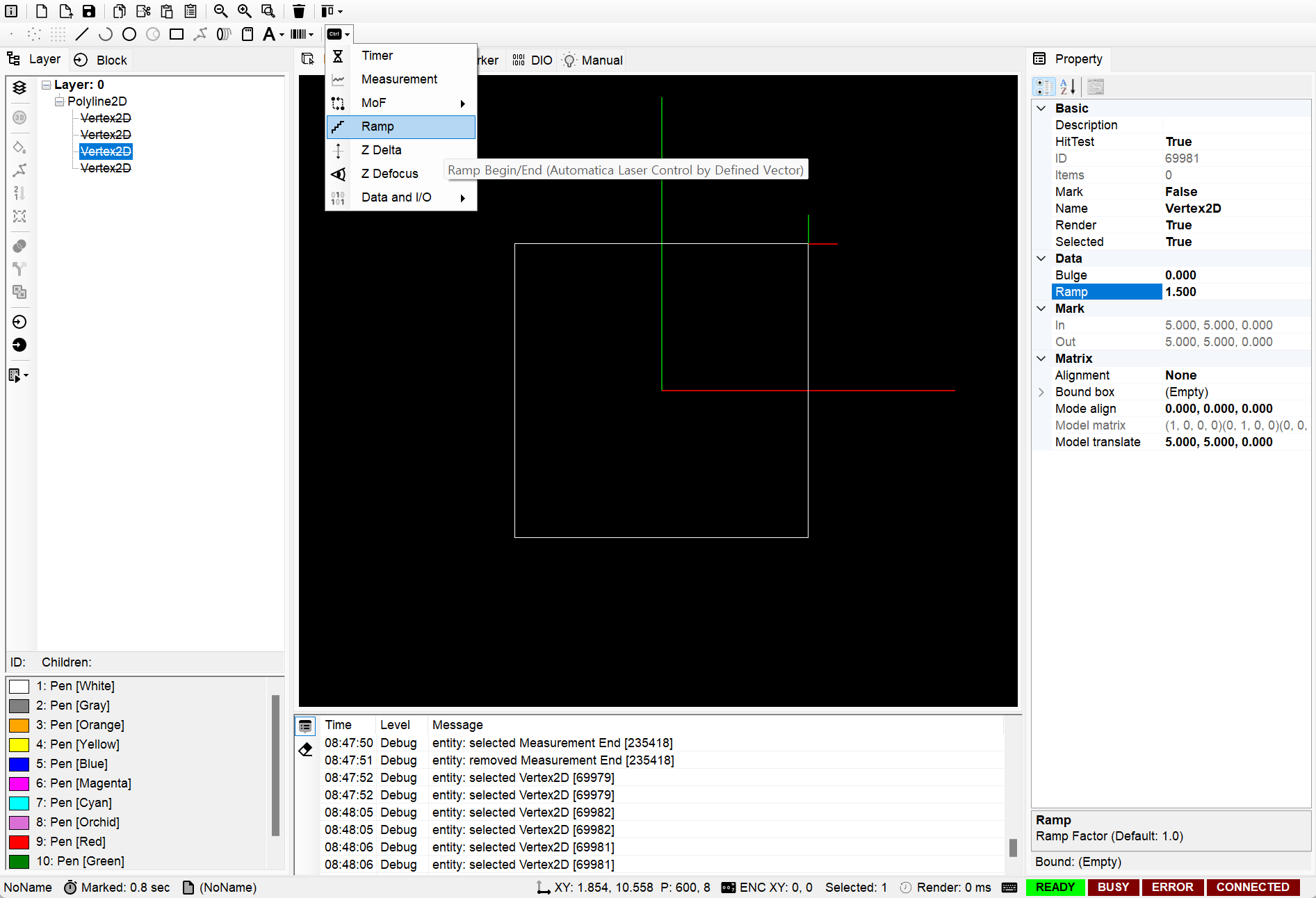
자 그럼 제어 개체 목록에서 Ramp 개체를 아래와 같이 생성합니다.
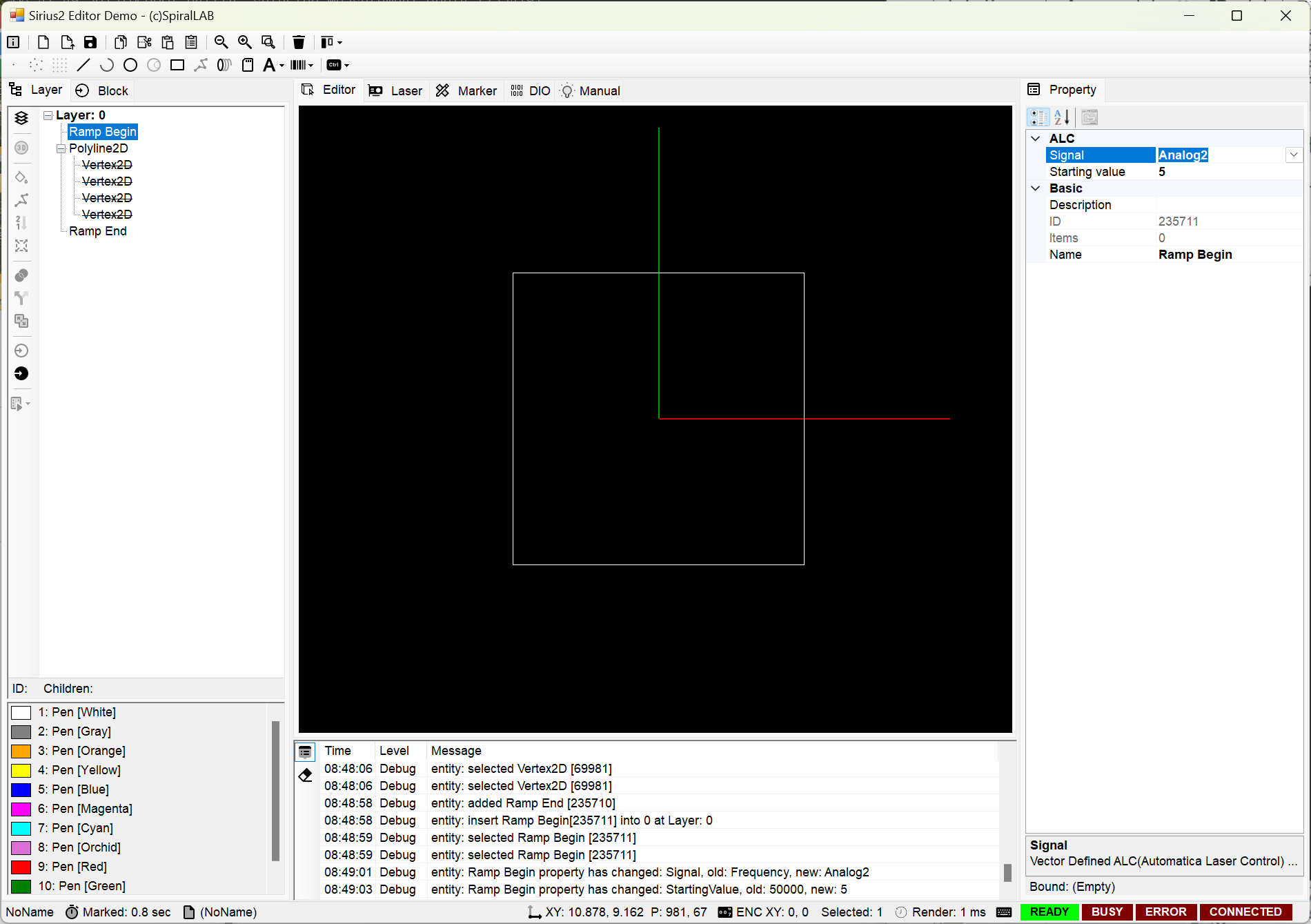
Ramp Begin/End 개체가 가공 경로의 앞뒤로 자동 생성되었고, Ramp Begin 개체에서 제어 신호(Signal)를 아래와 같이 아나로그2(Analog2) 및 시작값은 5V 로 설정합니다. (0~10V 사이의 값)
자 그럼 계측(Measurement)을 위해 아래와 같이 제어 개체를 추가 생성하고 대상 채널에 아나로그2(Analog2) 항목으로 변경해 줍니다.
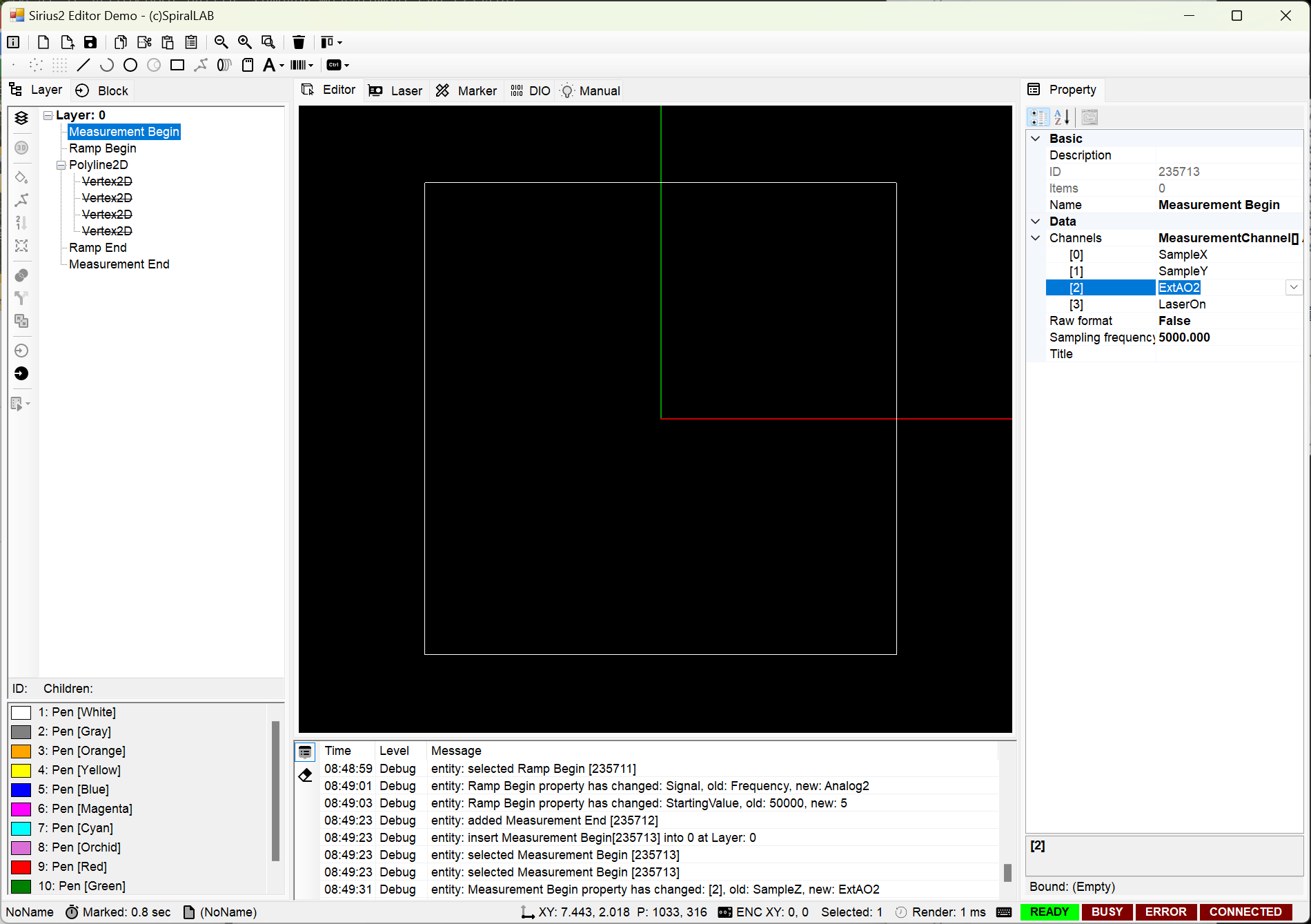
마커 창(Marker window)에서 가공 시작을 진행하면 아래와 같이 대상 채널에 대한 계측이 실시됩니다.
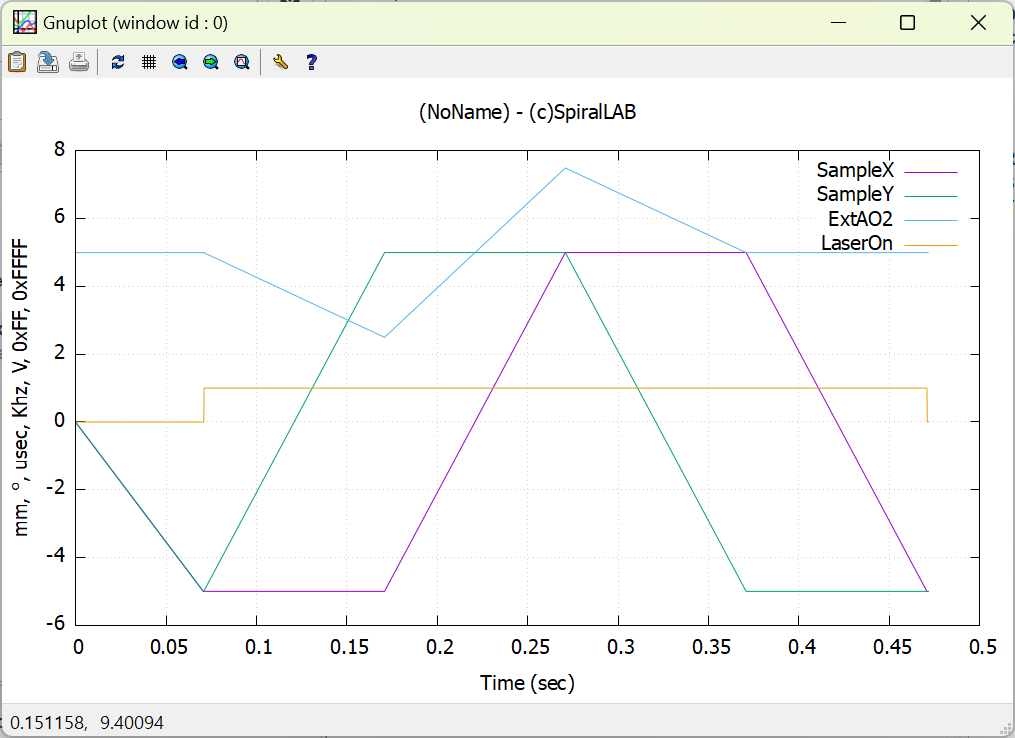
아나로그2(Analog2) 채널의 변화를 보면 시작값은 5V이며, 4개의 정점에 설정된 Ramp Scale Factor값이 각각 1, 0.5, 1.5, 1 이므로 실제 구간 별 출력은 아래와 같습니다.
- 5V x 1 = 5V
- 5V x 0.5 = 2.5V
- 5V x 1.5 = 7.5V
- 5V x 1 = 5V
즉 일반적인 가공 경로는 Ramp Scale Factor 값과 무관하나, Ramp Begin/End 사이에 놓이게 되면 Ramp 제어가 활성화 되면서 지정된 출력 신호에 영향을 미치게 됩니다.
참고) 여기에서 설명되는 Ramp 출력 기법은 RTC 제어기의 ALC(Automatic Laser Control) 기법중 Defined Vector 에 해당합니다.
다른 방식의 PoD (Pulse on Demand) 사용법
위와 같이 구간 별 출력 제어 뿐 아니라 RTC 제어기에서는 추가적인 제어 방법도 제공됩니다. 즉 Defined Vector 기법 이외에도 스캐너 혹은 가공 대상의 속도 변화(가감속 구간)에 따른 출력을 가변시키는 것도 가능한데 이를 속도 의존적 (Speed Dependent ALC) 출력 제어 방법이라 합니다.
시리우스2 라이브러리에서는 아래와 같이 해당 레이어(Layer) 에서 이 기능을 활성화 할 수 있습니다.
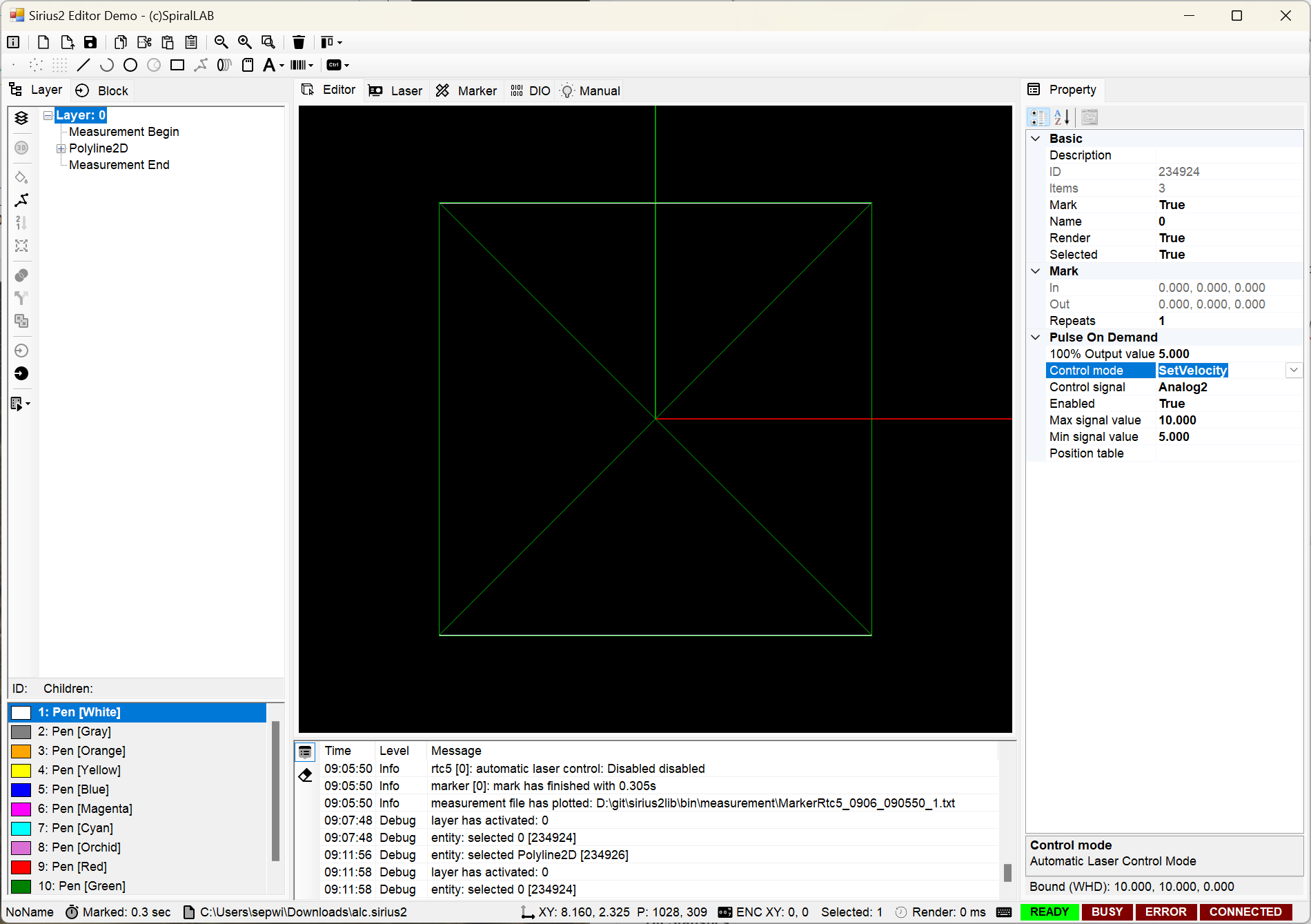
위와 같이 레이어(Layer) 에서 PoD 기능을 활성화 하고 가공 및 계측을 실시한 결과는 아래와 같습니다.
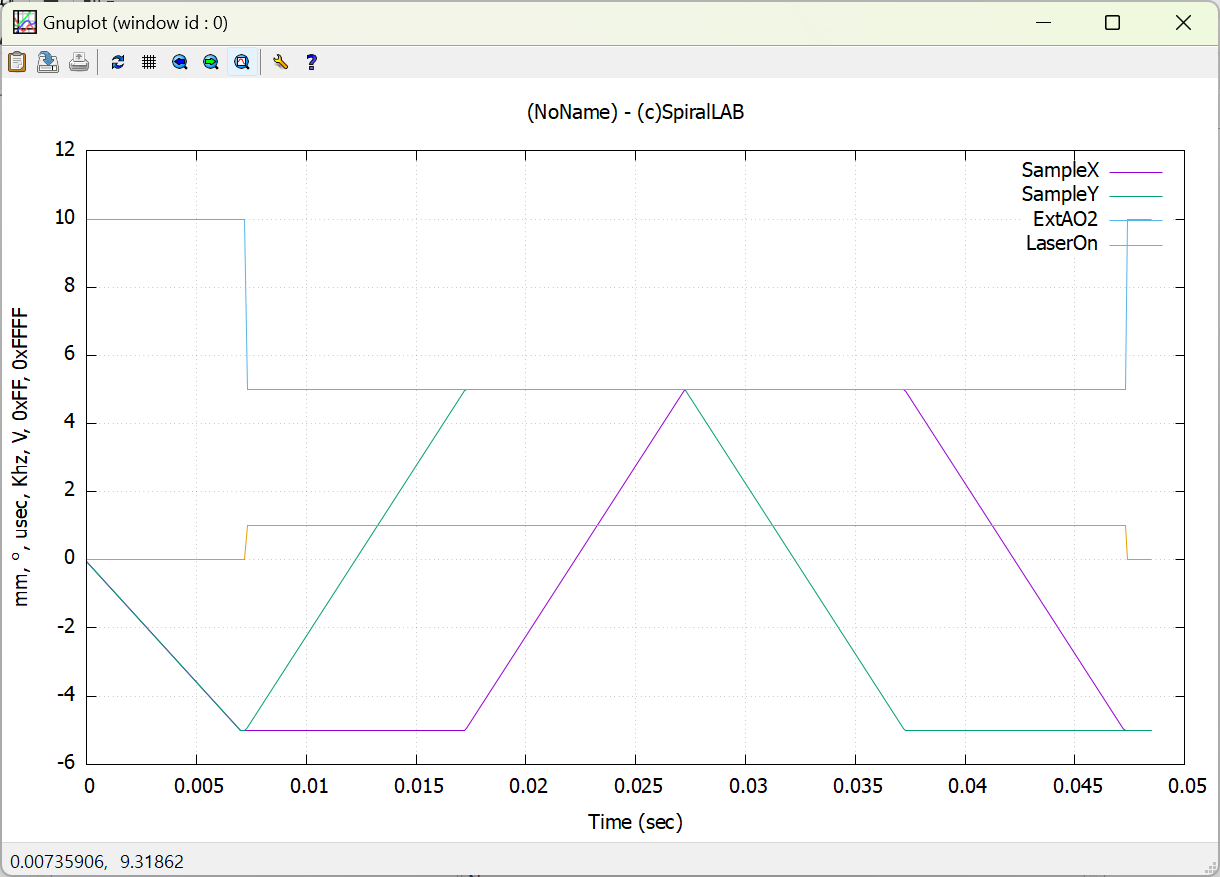
참고) 제어 모드(Control mode)에서 실제 스캐너 속도(Actual Velocity) 에 따른 가변 출력을 사용하기 위해서는 iDRIVE 기능이 내장된 제품이 필요합니다. (예를 들어 Intelli~ 시리즈 제품군)
참고) Defined Vector, Speed Dependent 방식 이외에도 Position Dependent(위치 의존적) 가변 출력 제어도 제공됩니다. 이를 사용하기 위해서는 레이어(Layer) 항목중 위치 테이블 (Position Table) 항목에 다음과 같은 아이템이 추가되어야 합니다. (스캐너 중심으로 부터의 거리, 출력 스케일 값)
2023.11.3 에 적용된 버전 v.1.8.865 업데이트에 의해
- editor_alc 데모 프로젝트가 추가 (Defined vector 기반의 제어 방법을 보여줍니다)
- editor_alc2 데모 프로젝트가 추가 (Speed dependent, Position dependent 기반의 제어 방법을 보여줍니다)