1. 비전 이미지를 통한 스캐너 필드 보정 지원
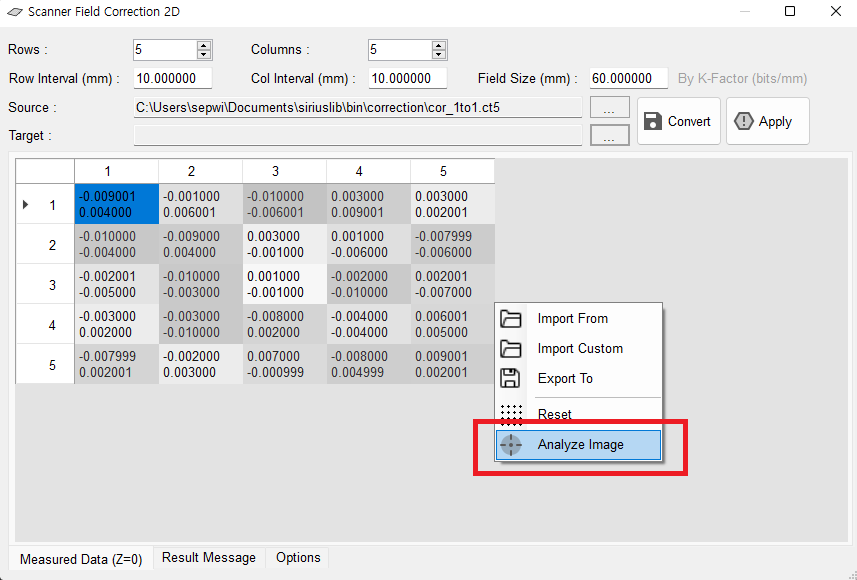
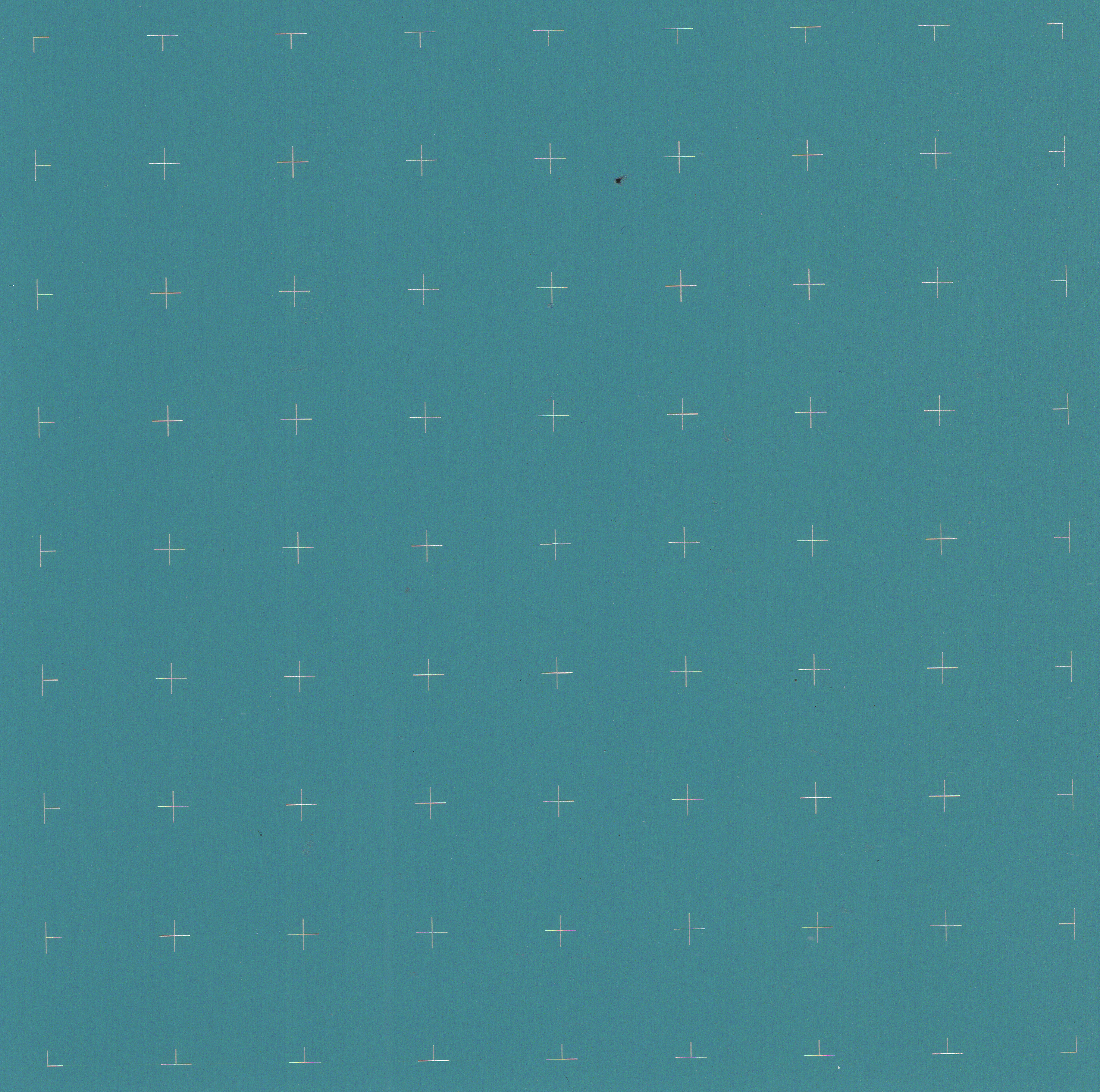
‘+’ 형상으로 레이저 가공한 대상물을 광학식 스캐너를 이용하여 이미지 파일로 변환합니다. 이 파일을 아래와 같이 불러드린후 적절한 설정값 (가로 세로 개수, 간격 등) 을 입력해 줍니다.
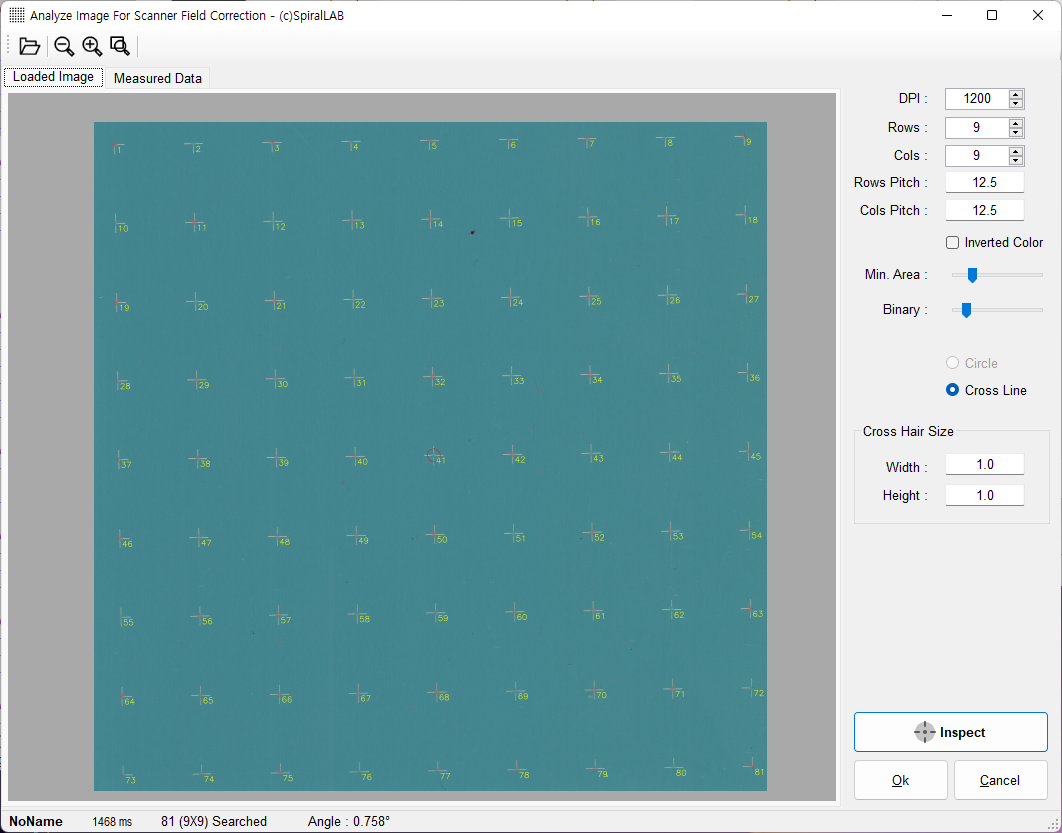
스캔된 이미지가 1200 DPI(Dots Per Inches) 해상도를 가지고 있다면, 픽셀당 약 20um 정밀도를 가지기 때문에 상당한 수준의 스캐너 필드 보정이 가능합니다.
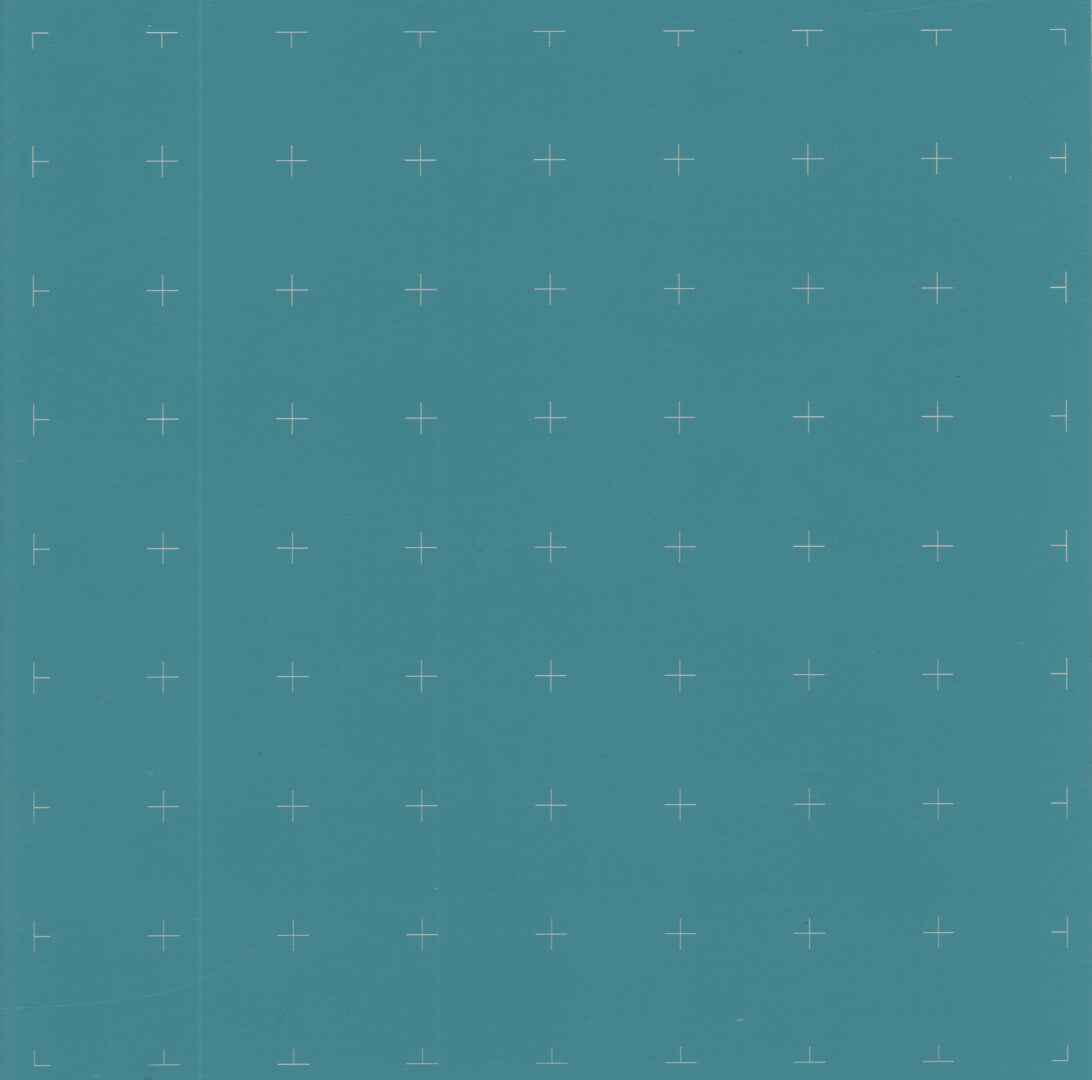
위 이미지는 100mm 필드를 12.5mm 간격으로 가로 세로 9×9 배열의 십자마크를 검출하고 있습니다. 스캐너 필드의 가장 끝 영역에서는 물리적 좌표 한계를 벋어나지 않도록 ‘+’ 형상이 아닌 ‘ㄴ ,ㄱ,ㅏ, ㅓ’ 과 같은 모양으로 만들어 마킹하였음을 참고해 주시기 바랍니다.
{kind=link}
{kind=link}
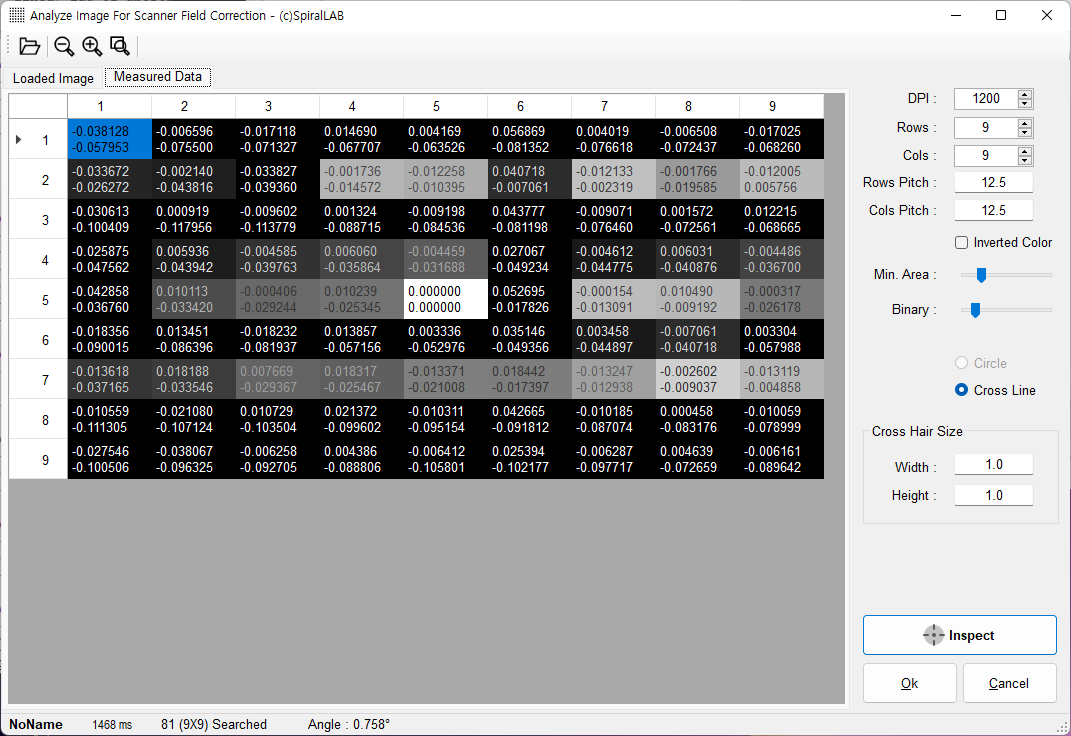
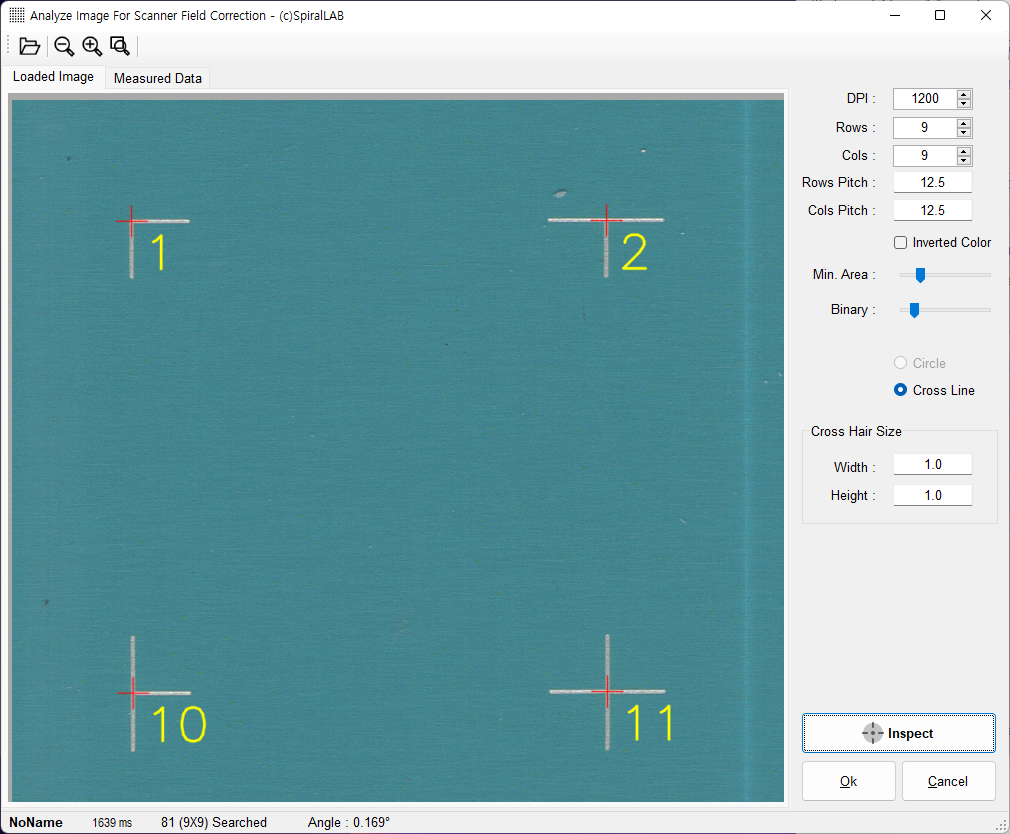
중심 좌표 위치를 자동으로 0,0 처리해 주게됩니다. 아울러 좌표 분석시 이미지가 전체적으로 회전이 발생된것을 보상하여 계산됩니다.
- 설비에 머신 비전 기능이 없거나 측정이 불가할 경우 마킹 이미지를 스캔하였다면 현장에서도 정밀한 스캐너 필드 보장이 가능합니다.
- 시리우스(Sirius) 라이브러리를 사용할 경우 해당 기능이 포함되어 있습니다.
- 주의사항) OpenCV 기반으로 동작하므로, 실행 환경에 맞게 bin\x64(혹은 x32)에서 OpenCvSharpExtern.dll 파일을 bin 폴더로 복사후 사용해 주시기 바랍니다.
2. 기타 수정사항
- 레이저 소스 제어용 데모 코드 추가됨
- 그룹으로 묶여있는 폰트 다운로드 및 내부 스크립트 지원 개선
- 마커 중지(Abort) 시 지연현상 개선
- MOTF(Marking On The Fly)
- 시작(Begin) 시 엔코더 리셋 여부 지원
- 가상 엔코더 속도(Simulated Encoder Speed) 입력 지원
- 엔코더 Pulses/mm 값 음수 지원 (방향 역전 가능)
- RTC 레이저 시그널 (Modulation/Gate) 의 전역적인 온오프 지원
3. v1.9.3에서 개선된 사항
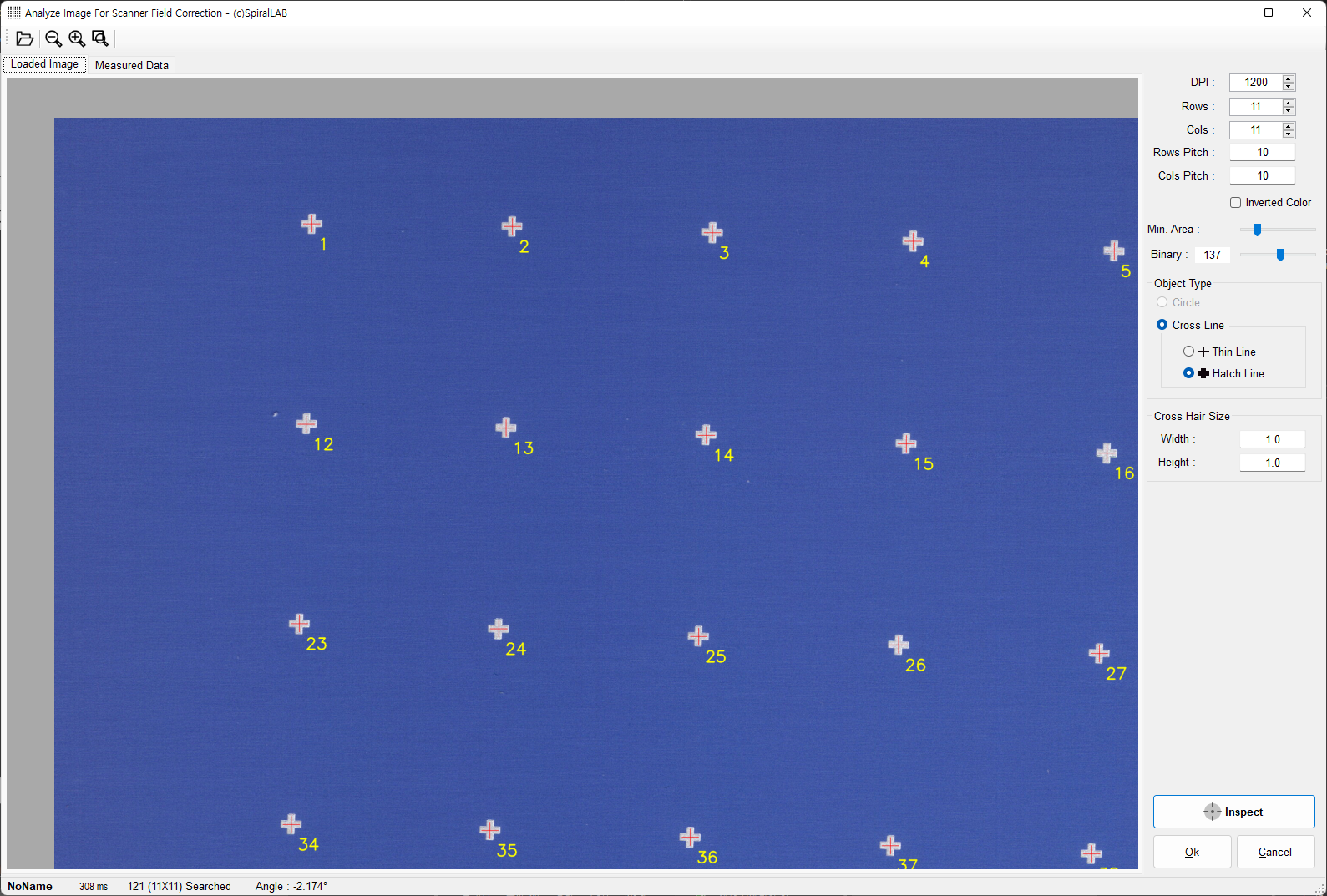
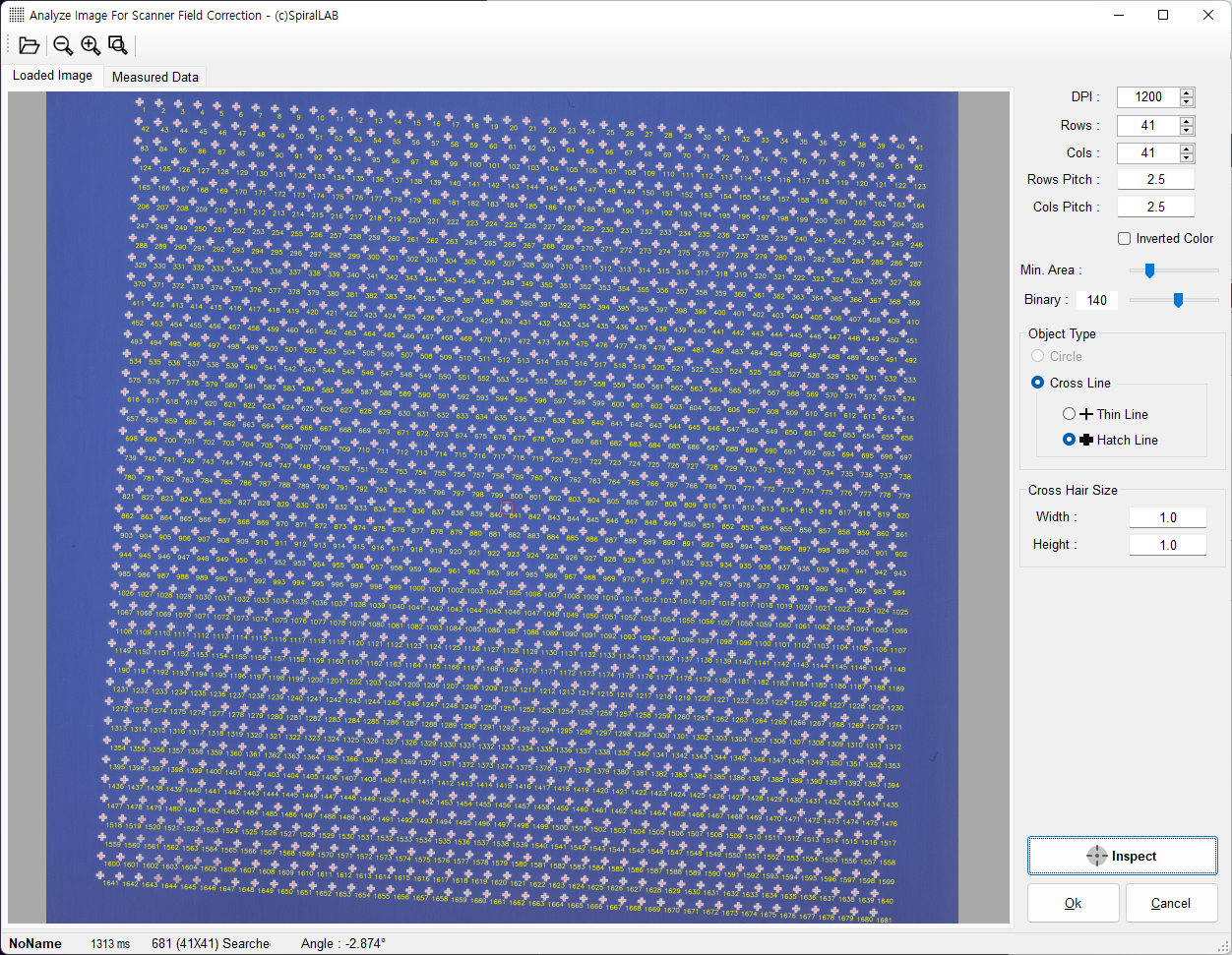
기존의 얆은 선분 (Thin Line )뿐 아니라 아래와 같이 해치가 들어간 패턴에 대해서도 검사가 지원됩니다. 이를 위해 이진화(Binary) 설정값이 추가되었고, 실선/해치 여부를 선택해 주시기 바랍니다.
{kind=link}
{kind=link}