1. 2nd(Secondary) 헤드 사용
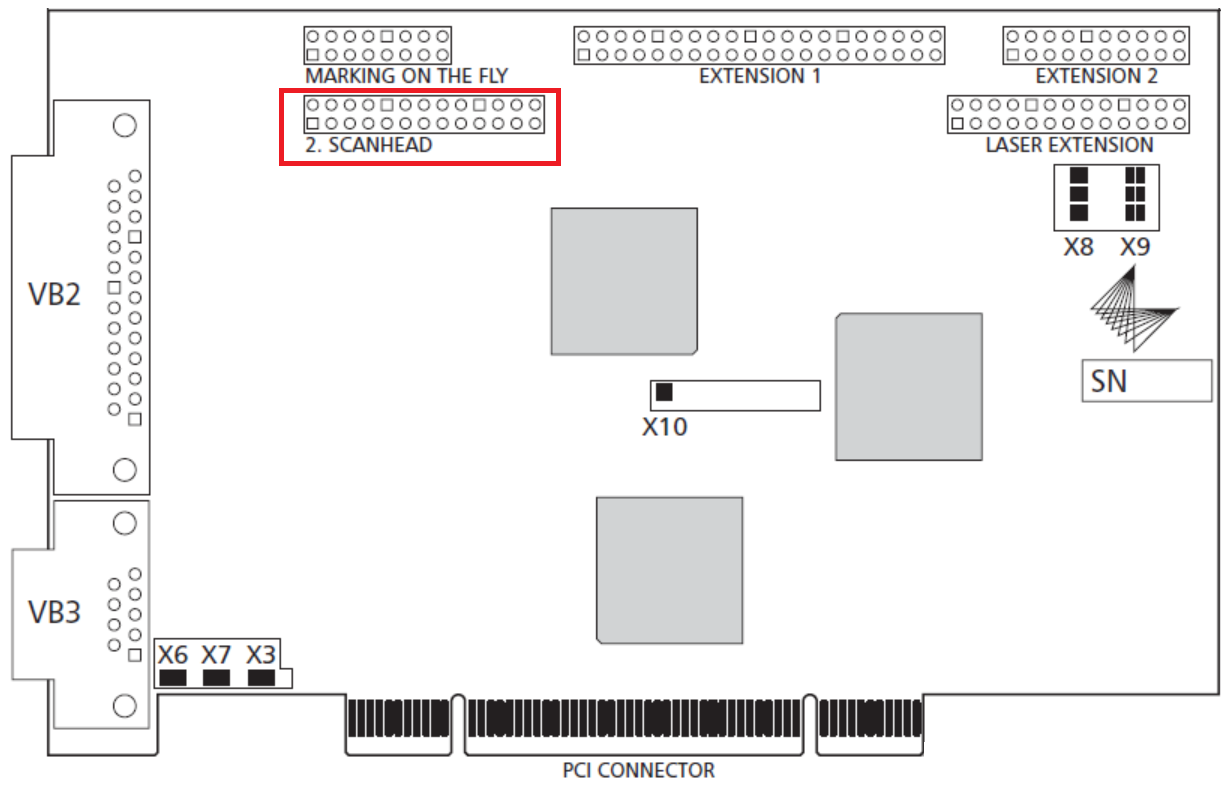
하나의 RTC 제어기에서 2개의 스캔 헤드 장치를 구동하고자 할때 이를 사용하는 방법을 살펴보겠습니다. 이 경우 하나의 레이저 소스에서 출력된 레이저를 빔 스플리터(Splitter) 등의 광학 장치를 통해 개별 헤드의 입사빔으로 입력되고, 두 스캔헤드는 동일한 가공 데이타를 동시에 가공하게 됩니다.
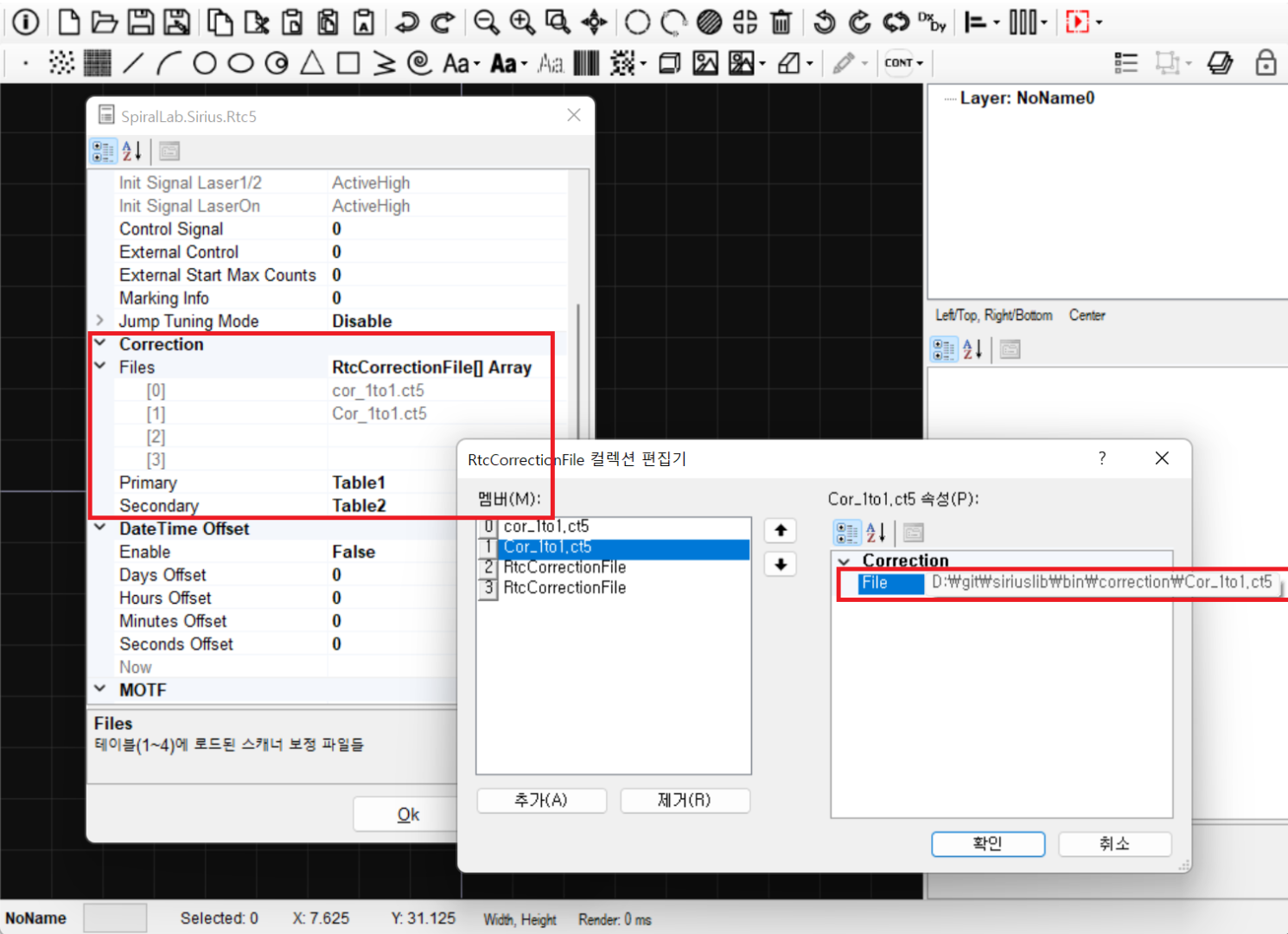
다만 개별 헤드에는 스캐너 필드 보정 파일을 별도로 적용 가능하며, 추가적으로 오프셋(X,Y 및 회전) 값이 적용가능합니다.
이를 위해 아래와 같이 개별 헤드에 각각 스캐너 필드 보정 파일을 로드(Load)및 선택(Selecte)해 주어야 합니다.
스캐너 보정 테이블이 지정된 후에는 사용자는 아래와 같이 개별 헤드에 대한 오프셋(X,Y 및 회전각도) 값을 지정할 수 있습니다. 이때 적용되는 최종 오프셋 값은 아래와 같습니다.
오프셋 값 = 기준(Base) 오프셋 + 사용자(User) 오프셋
통상 기준(Base) 오프셋 값은 개별 스캔 헤드가 설계 치수에 도달하도록 조절해주며, 사용자(User) 오프셋 값은 개별 레시피(작업 파일)에 적용되어야 하는 값을 설정하는것을 추천 드립니다.
(참고) 2nd 헤드 기능을 사용하기 위해서는 RTC 카드에 해당 옵션이 활성화 되어 있어야 합니다.
2. MOTF(Marking On The Fly) 데모 프로그램
최근 업데이트에서 편집기에서 MOTF 를 사용하는 데모 프로그램이 공개되었습니다. 이 데모 프로그램에서는 외부 X,Y 엔코더의 입력으로 물체의 XY 이동량을 보상처리하는 예제와 함께 외부 회전 엔코더의 입력으로 물체의 회전 각도를 보상 처리하는 두 가지 예제가 제공됩니다.
첫번째 예제에서는 MOTF 를 위한 예제 작업 파일이 제공됩니다. “Open Sample File”을 누르면 이 파일을 자동으로 로드하게 되며, MOTF 시작/끝, 엔코더 대기, 가공 등 개별 개체가 어떤 순서로 생성되어 있어야 하는지 아래와 같이 확인 가능합니다.
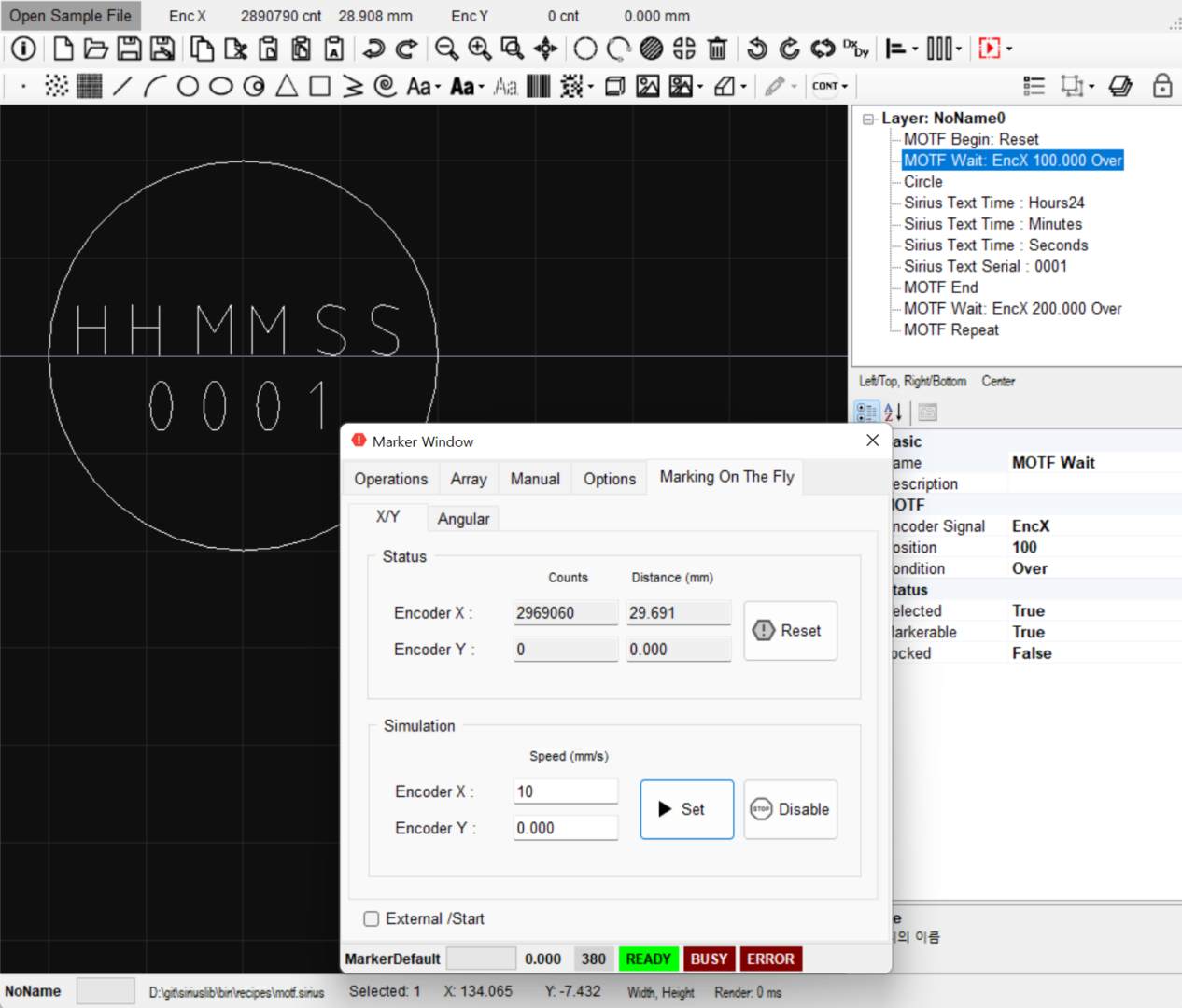
실제 외부 엔코더 입력이 처리되어 있지 않다면 위와 같이 Simulation 에서 가상으로 엔코더 발생이 가능합니다. 실제 가공 시작(Start)을 하게 되면
- MOTF 시작
- X 엔코더 위치가 100mm 를 넘을때 까지 대기
- 원 가공
- 시,분,초 및 일련번호 가공
- MOTF 끝
- X 엔코더 위치가 200mm를 넘을때 까지 대기
- 리스트 명령의 시작위치로 점프 (반복 가공 적용됨)
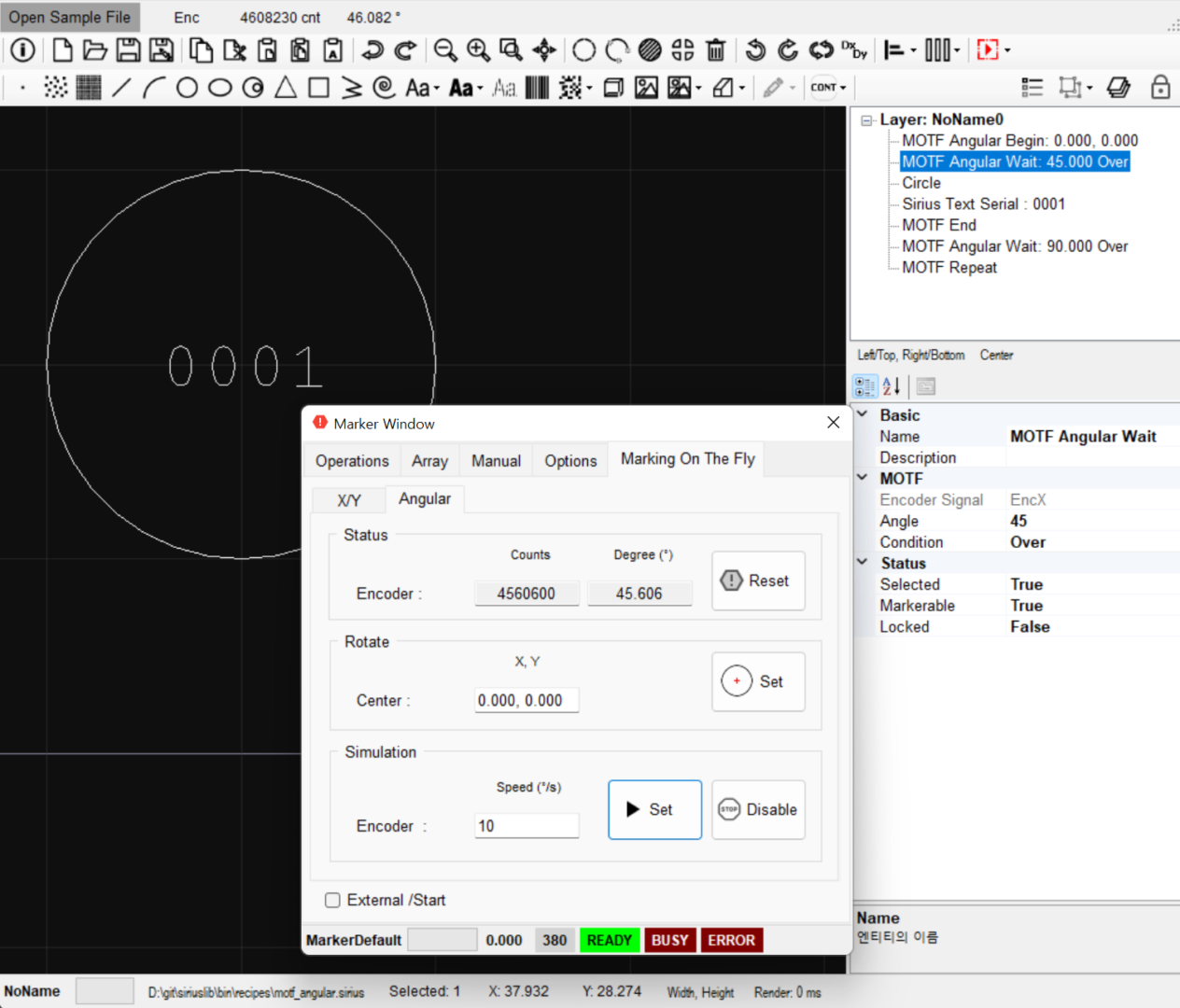
위 예제에서는 유사하게 회전 물체가 45도를 넘은후에 원을 가공하는 등 의 절차를 보여주고 있습니다.
(참고) MOTF XY 사용을 위해서는 엔코더 스케일 (Pulses/mm) 값이 미리 지정되어 있어야 합니다.
(참고) MOTF Angular 사용을 위해서는 엔코더 스케일 (Pulses/deg) 값이 미리 지정되어 있어야 합니다.
(참고) MOTF Repeat 기능 사용을 위해서는 List Type 을 단일 버퍼(Single) 로 설정해야 합니다.
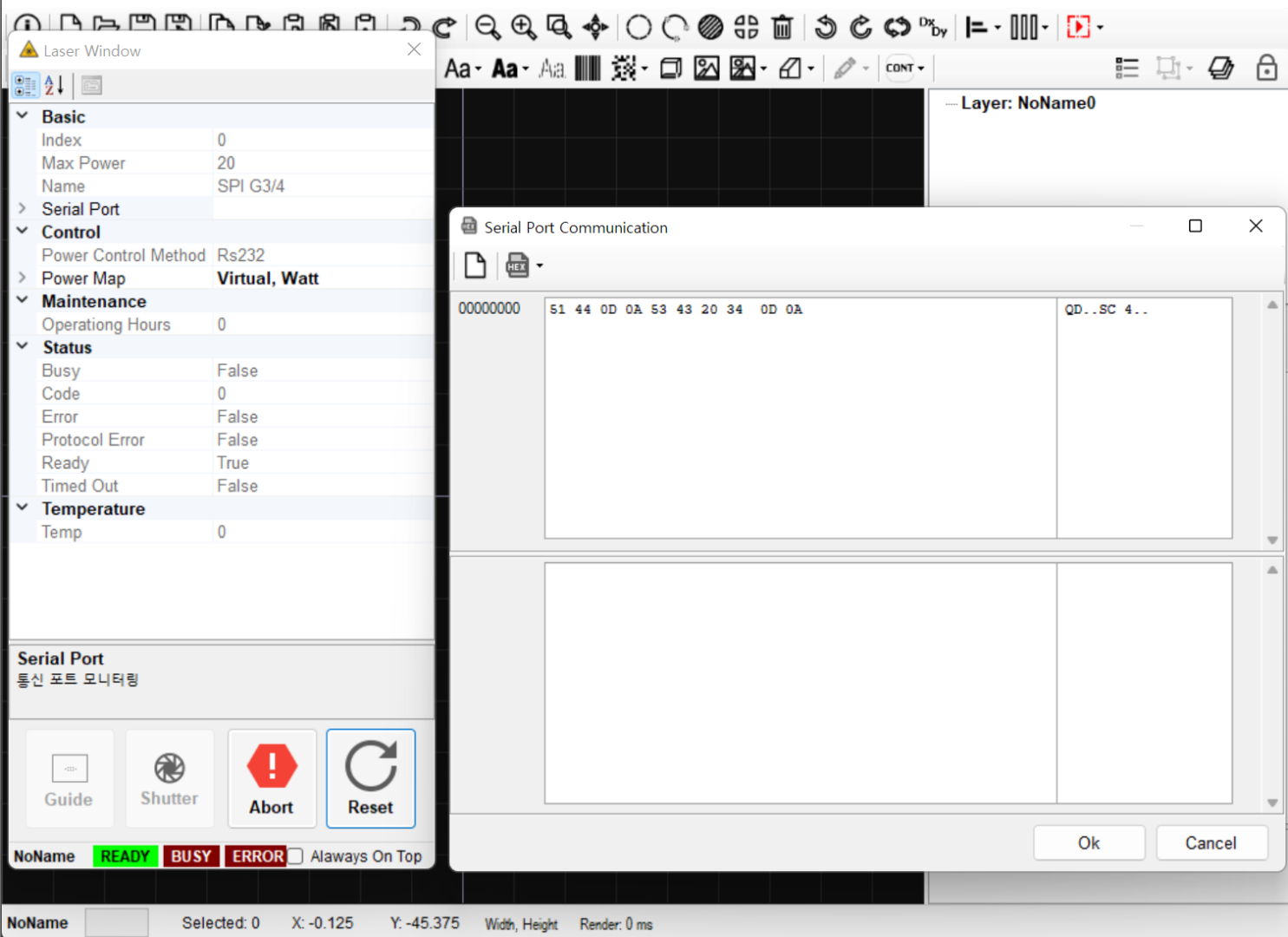
3. 레이저 통신 모니터링
레이저 소스 통신이 빈번히 처리되는 내부 과정에서 실제 데이타 송수신되는 데이타에 대한 모니터링 툴을 제공합니다. 아래와 같이 모든 과정이 16 진수 형태로 분석툴이 제공됩니다.
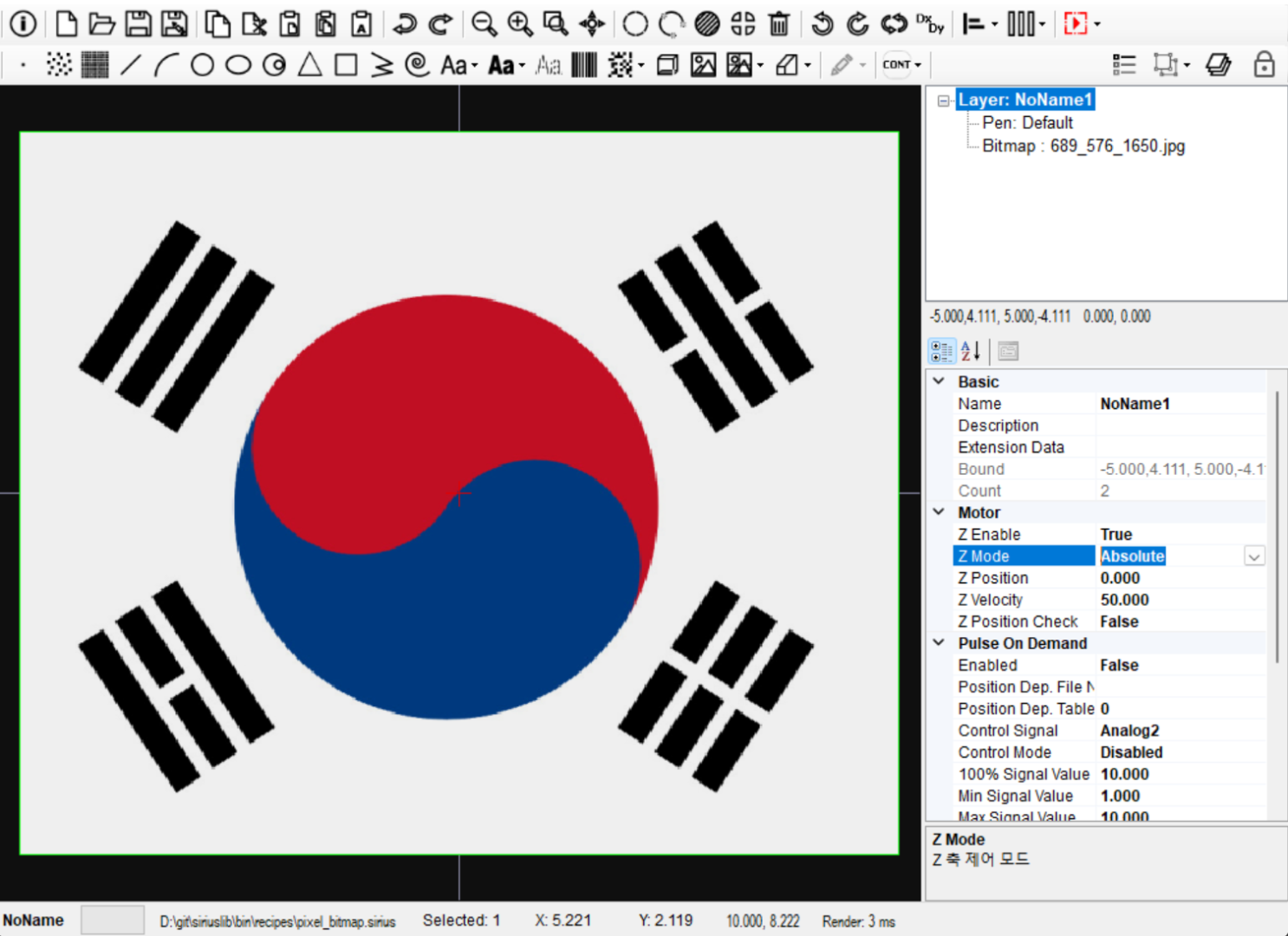
4. 스캐너 Z 축 제어 개선
IMotor 인터페이스를 상속 구현한 후 이 객체를 아래와 같이 편집기에 지정을 하면 각 레이어(Layer)별로 스캐너 Z 축 모터에 대한 위치 제어를 지원하게 됩니다. 또한 상대/절대 위치 이동 여부를 선택할 수 있으며, 엔코더 응답이 가능할 경우 Position Check 옵션을 활성화해서 실제 위치(Actual Position) 에 도달했는지 여부도 처리 가능해 집니다.
var motorZ = new YourMotor();
SiriusEditorForm.MotorZ = motorZ;
5. 기타 v.1.121 업데이트 사항
- RTC 초기화시 출력 신호 레벨 설정 가능 (Active High/Low)
- RTC 레이저 모드 YAG3,5 및 MODE4, 5 추가 지원
- 4개의 멀티 헤드 사용 예제 프로젝트 추가
- intelliSCAN 스캔 헤드 전용 점프 튜닝 모드(Jump Mode) 지원
- SCANahead 옵션 기능 제어 지원 (RTC6 + excelliSCAN 전용)